
30 May 2015





Slot.it
Audi E-Tron Quattro 4WD
#4 - 24 Hours Le Mans Test - 2013
CA-29a
#4 - 24 Hours Le Mans Test - 2013
CA-29a
This review is an
important one for fans of this brand. Even if the car itself does not
appeal to you, we have been honored by the feedback from the owner of
Slot.it - Maurizio Ferrari. This slot car represents continued
innovation that many models before it have achieved and will likely be
very appealing to both home and club competitors alike.
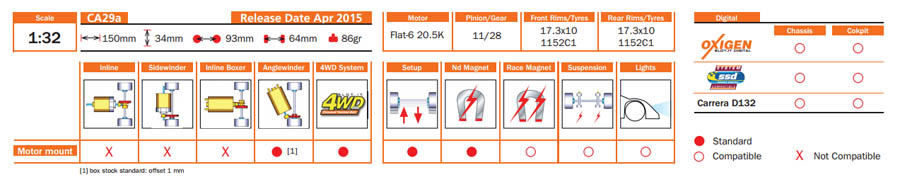
Data At A Glance
Appearance
The
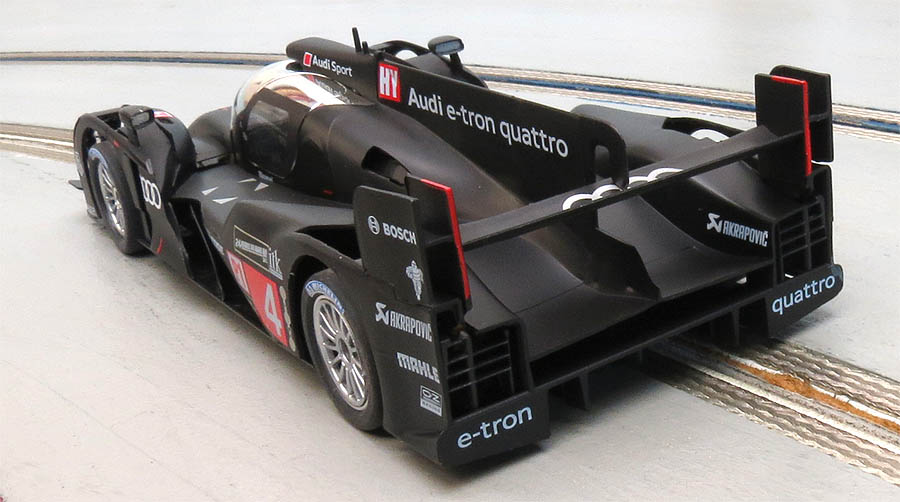
body of this car is well done as you would expect from Slot.it.
Excellent finish and very well detailed. In case you thought this was
the previous model, think again.
Maurizio: The body
is completely new, representing the 2013 version of the Audi r18
e-tron. Between 2011 and 2012 Audi has completely redesigned their R18:
front lights, body shape, tail, pretty much everything is different.
For us, chassis apart, it's a completely different model.
As
usual only you can decide if Slot.it made a car well enough to suit
your taste. For me it is more than enough.
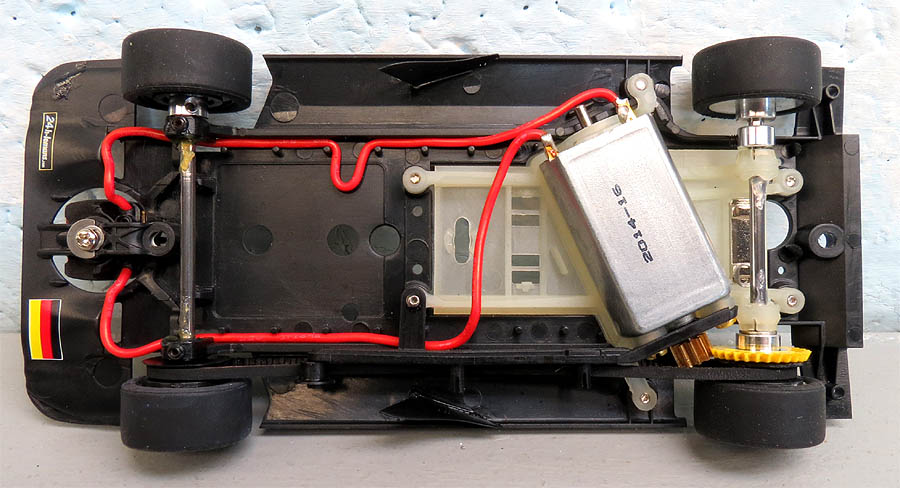
Looking
underneath we get a glance at the heart of this beast. Standard Flat-6
motor anglewinder configuration is a familiar sight but that is just
the beginning.After
removing the 2 screws (one front, one rear) we finally get inside.
I'll let Maurizio explain the
concept: To my knowledge,previous 4WD systems applied to
slot cars never tried any serious
attempt to solve the equation of providing extra traction, without
affecting cornering. What we've done is a system that can only provide
'positive' torque, that is, as soon as for whatever reason the front
shaft tries to spin slower than the wheel (for example, inside wheel
during cornering, or under braking), i.e. each time a braking torque is
applied to the shaft, the wheel can spin freely. Exactly like in a
standard bike: you can only apply 'positive' torque, to move forward;
if you try to pedal backwards, there's no effect.So whenever the rear
wheels brake free (even during
wheel-spin on straight acceleration),torque is transferred to the
front.
Basically
this means the front wheels can only turn forward. They will lock up if
you try to turn them backwards (reverse).
Here are some additional photos that might help as well.
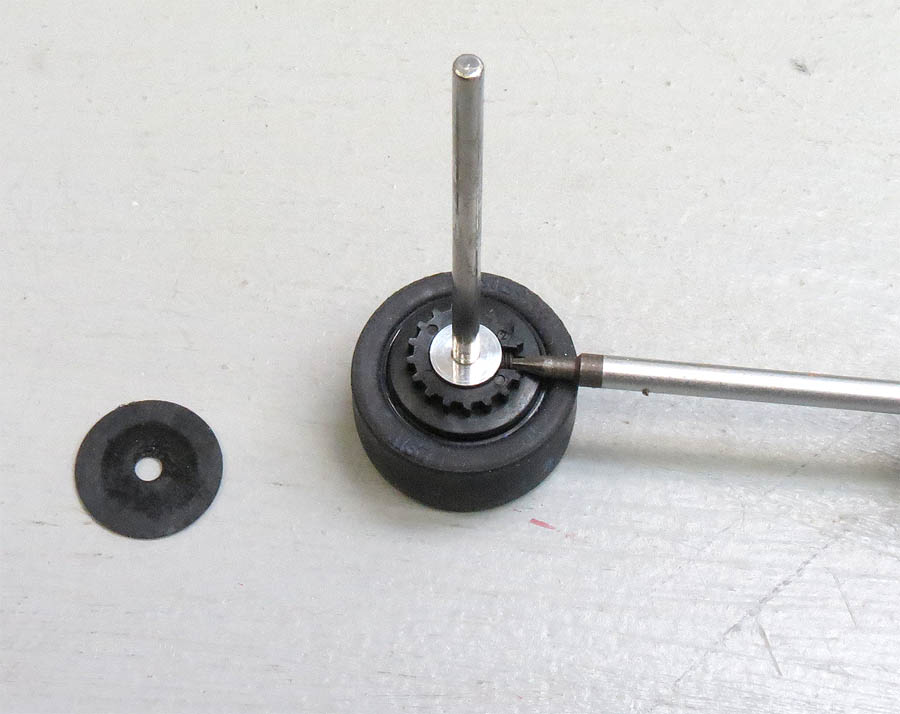
You must remove the set screw to remove gear.
The bearing is a tight fit inside the wheel. Use a small wooden dowel rod to tap it out.
You WILL NEED the smaller SEEGAR Snap Ring Pliers for best results.
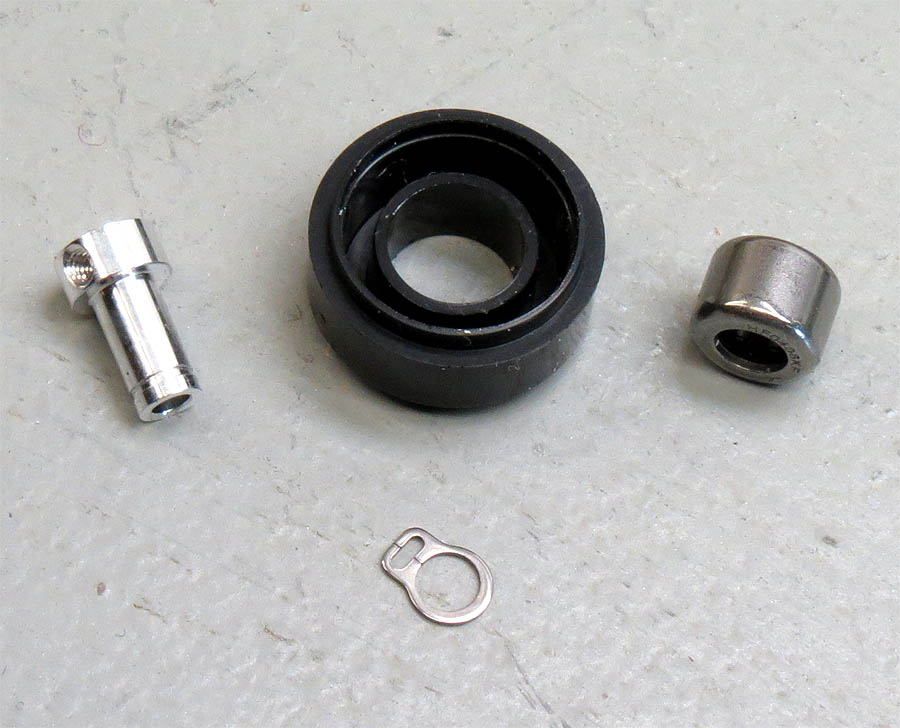
There are spare rings under the case as well as spare pulleys and guards.
I did bend my ring too far and needed to replace it, so be careful when removing.

The bearings do have an engraved arrow to indicate direction.

Pulley tooth count is identified by the number of dots on the backside.

-
Harry
Feel free to contact
me about this article or just our hobby in general.This
review is one of the rare ones where the manufacturer went the extra
mile and publishes a detailed instruction guide.
CLICK HERE FOR THE OFFICIAL SLOT.IT MECHANICAL INSTRUCTION GUIDE
This excellent reference shows you just how this
car is assembled and I feel it does not need to repeated here. The
purpose of a review is to help the enthusiasts learn more about the
model in question and the guide Slot.it provides certainly does this
well enough.CLICK HERE FOR THE OFFICIAL SLOT.IT MECHANICAL INSTRUCTION GUIDE
Here are some additional photos that might help as well.
You must remove the set screw to remove gear.
The bearing is a tight fit inside the wheel. Use a small wooden dowel rod to tap it out.
You WILL NEED the smaller SEEGAR Snap Ring Pliers for best results.
There are spare rings under the case as well as spare pulleys and guards.
I did bend my ring too far and needed to replace it, so be careful when removing.
The bearings do have an engraved arrow to indicate direction.
Pulley tooth count is identified by the number of dots on the backside.
BoxStock
Track Test
MidMo International Speedway
4x16 - 3 Lane Routed MDF - Satin/Flat Latex Surface
Slot Car Corner Braid - Pyramid 26KX Power Supply @ 12 Volts
Diflaco Control
MidMo International Speedway
{kind=link}
4x16 - 3 Lane Routed MDF - Satin/Flat Latex Surface
Slot Car Corner Braid - Pyramid 26KX Power Supply @ 12 Volts
Diflaco Control
Before we get started,
let's hear what Maurizio has to say about the performance of the model.
I asked these questions which I am sure some of you will be interested in:
I asked these questions which I am sure some of you will be interested in:
In
your race testing on larger tracks, how did the model compare to
standard versions?
Do you think racers could mix the field or will the 4WD system be a class all it’s own for the future?
Do you think racers could mix the field or will the 4WD system be a class all it’s own for the future?
Maurizio: Very
difficult question! The system was designed in first place as a
challenge, to see if we could make a 4WD system which could work well
inside a model that was a real 4WD (Audi R18 e-tron). I knew it could
be quite good for rally cars (actually I had the clutched design sketch
and first prototype made 15 years ago), but for LMP it was totally
uncharted territory.
So far, I've used the model in two 24 hours, on on Ninco and one on Scalextric Sport. It ran surprisingly well - setting pole on Ninco.
It can be competitive with standard 2WD systems, but a lot depends on the grip of the surface you're running the car on.
So far, I've used the model in two 24 hours, on on Ninco and one on Scalextric Sport. It ran surprisingly well - setting pole on Ninco.
It can be competitive with standard 2WD systems, but a lot depends on the grip of the surface you're running the car on.
A few tips:
1 - Make sure that the whole system is running with as little friction as possible; to check it out, remove braking from controller and gauge how far model goes under braking.
2 - Contrary to standard setup tips, where the wheels are in general left as high in the chassis as possible, you need to have the car planted on all four wheels. This means that, being the front wheels lower than the chassis, the bottom of the pickup may rise, leaving less blade in the slot. On Ninco, being the surface quite wobbly, front wheels must be lowered significantly, leaving little blade in the slot. To avoid this effect, use the wooden guide pickup, and file its sides so that it fits the Ninco slot width comfortably. This can also be done on Scalextric Sport, and certainly on wood and Carrera the wood type LMP pickup should be preferred.
3 - we've discovered during the 24 hours races that the model, surprisingly, doesn't loose much top speed. We believe it is due to the fact that the front wheels are actually running on bearings, and that the pickup is only used as a guide, not a resting point - hence, no pickup friction as it's bearing no weight. Actually our braids were still very good after 24 hours of racing.
4 - We're announcing today spare part CH105 which is a ball bearing that can be used on the belt tensioner to reduce its friction.
1 - Make sure that the whole system is running with as little friction as possible; to check it out, remove braking from controller and gauge how far model goes under braking.
2 - Contrary to standard setup tips, where the wheels are in general left as high in the chassis as possible, you need to have the car planted on all four wheels. This means that, being the front wheels lower than the chassis, the bottom of the pickup may rise, leaving less blade in the slot. On Ninco, being the surface quite wobbly, front wheels must be lowered significantly, leaving little blade in the slot. To avoid this effect, use the wooden guide pickup, and file its sides so that it fits the Ninco slot width comfortably. This can also be done on Scalextric Sport, and certainly on wood and Carrera the wood type LMP pickup should be preferred.
3 - we've discovered during the 24 hours races that the model, surprisingly, doesn't loose much top speed. We believe it is due to the fact that the front wheels are actually running on bearings, and that the pickup is only used as a guide, not a resting point - hence, no pickup friction as it's bearing no weight. Actually our braids were still very good after 24 hours of racing.
4 - We're announcing today spare part CH105 which is a ball bearing that can be used on the belt tensioner to reduce its friction.
Time for my own track test and
overview.
In closing I asked a few more questions:Could racers adapt this system to existing models? If so, how
soon will a “conversion kit” and spares become available?
Maurizio: We designed the system so
that it is an 'add on' to existing R18 models. The chassis being the same, the
way we designed the 4WD system it could be used on any '2WD' Audi R18 of ours
(except CA24a, whose chassis needs to be changed if a 4WD system must be
fitted). Future Aston Martin Lola will also be compatible (but 4WD will not be
fitted as standard on such model), any DTM car will at least be compatible, and
the front clutched wheels can also be used on SCX 4WD models.
Very important: we're days away from releasing 3D printed 4WD chassis for Scalextric Audi Quattro and Lancia Delta S4:
http://www.shapeways.com/product/2AWT7DCMP/s05-st1-scalextric-lancia-delta-s4-chassis
https://www.shapeways.com/product/S3YBAXZ3H/s04-st1-scalextric-audi-sport-quattro-s1-chassis Not for sale yet but getting ready.
Spares are being announced as I write. A few more spares (different diameter wheels, and more belt length) will be announced next month.
Very important: we're days away from releasing 3D printed 4WD chassis for Scalextric Audi Quattro and Lancia Delta S4:
http://www.shapeways.com/product/2AWT7DCMP/s05-st1-scalextric-lancia-delta-s4-chassis
https://www.shapeways.com/product/S3YBAXZ3H/s04-st1-scalextric-audi-sport-quattro-s1-chassis Not for sale yet but getting ready.
Spares are being announced as I write. A few more spares (different diameter wheels, and more belt length) will be announced next month.
This
is a great running model with a lot of potential. As you have read from
Maurizio, the future of this system is getting brighter and will only
grow in popularity over time.
I think most enthusiasts should really take a long look at what this car has to offer.
It just might be the first of many models that will really add something new on your home or club track.
I think most enthusiasts should really take a long look at what this car has to offer.
It just might be the first of many models that will really add something new on your home or club track.
This Review Proudly Sponsored by Cloverleaf Racing

Support Those Who Support You!
Copyright © 2015 Home Racing World